仔细阅读材料,根据材料提供的信息回答问题:
我们已经学过杠杆的力臂和杠杆的平衡条件,如果把这些知识稍加拓宽和延伸,就可尝试用新的方法来解决一些实际问题.有固定转动轴的物体在力的作用下处于静止或匀速转动的状态称为力矩平衡状态.物理学中把力和力臂的乘积叫做力对转动轴的力矩.力矩用M表示,即M=FL,式中L为力臂,力臂是转动轴到力的作用线的距离.在国际单位制中,力矩的单位是牛顿•米,符号为N•m.引入力矩概念后,杠杆的平衡条件可叙述为:
使杠杆沿顺时针转动的力矩与使杠杆沿逆时针转动的力矩相等.用公式表示为:M顺=M逆.
(1)力矩的表达式为:M= FL ,力矩的国际单位为 N•m .
(2)用垂直于门的力推门,推力F=80N,手到门轴的距离为0.3m,则F对门轴的力矩M为 24 N•m.
(3)如图所示,一根均匀木棒OA可绕过O点的水平轴自由转动,现有一方向不变的水平力F作用于该棒的A点,使棒从竖直位置缓慢转到偏角θ<90°的某一位置(缓慢转动可视为匀速转动),设M为力F对转轴的力矩,对此过程中M和F判断正确的是 A .(选填字母)
A.M不断变大,F不断变大 B.M不断变大,F不断变小
C.M不断变小,F不断变大 D.M不断变小,F不断变小

如图所示是正在建造中的我国自主设计的首艘科考破冰船“雪龙2号”,它将助力我国极地科考工作。该船设计空载排水量为 ,满载排水量为 ,能在厚冰层上连续破冰。(排水量为轮船在水中排开水的质量, 取 。
(1)空载时该船受到的重力为多少 ?
(2)假设破冰船在 厚的冰层海域以 的速度匀速直线破冰时所受的阻力为 ,则此时破冰船推进功率为多大?

北方人有吃饺子的习惯,刚包好的饺子,为什么放入水中会下沉,而过一会儿饺子会浮起来?
某实验小组的同学通过图甲所示的电路进行实验探究。
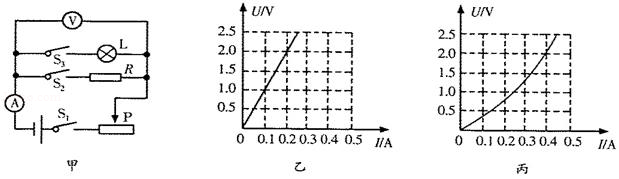
(1)断开开关 ,闭合开关 和 ,移动滑动阻器滑片 ,发现电压表始终无示数,电流表有示数,其原因可能是 (填符号)
.滑动变阻器断路 . 断路 . 短路
(2)故障排除后断开开关 ,闭合开 和 ,通过调节滑动变阻器,读出多组相应的电压表和电流表的示数。甲同学根据测量数据绘成如图乙所示图象。由图象可知定值电阻 ;
(3)乙同学根据测量数据分别计算出多个 的阻值并取平均值,其目的是为了 ;
(4)断开开关 ,闭合开关 和 ,通过多次调节滑动变阻器,测量灯 的电压和电流,根据测量数据绘成如图丙所示的图象。若灯 的额定电压为 ,则它的额定功率为 。
(5)由图丙可看出灯丝的 图象不是一条直线,原因是 。
小敏、小颖和小青在玩荡秋千时,感到秋千往返摆动时间有规律。于是对“哪些因素决定秋千往返摆动的时间”提出下列猜想,小敏猜想:可能由秋千的绳长决定;小颖猜想:可能由人与秋千坐垫的总质量决定;小青猜想:可能由秋千摆动幅度(摆动中人离开中心的最大距离)决定。于是进行了如图实验,一细绳一端拴一小球,一端固定,让小球自由往返摆动,并记录数据如表。
|
实验 序号 |
小球到固定点 距离 (摆长) 米 |
小球质 量 克 |
摆动幅 度 米 |
小球往返摆动 20次的时间 秒 |
小球往返摆动 一次的时间 秒 |
|
1 |
0.7 |
20 |
0.05 |
33.2 |
1.7 |
|
2 |
1.0 |
20 |
0.08 |
39.7 |
2.0 |
|
3 |
1.0 |
30 |
0.05 |
39.8 |
2.0 |
|
4 |
1.0 |
30 |
0.08 |
39.7 |
2.0 |
|
5 |
1.3 |
20 |
0.05 |
45.3 |
2.3 |
请回答下列问题:
(1)要完成上述实验,除如图器材外,还必需的实验器材是:天平、 ;
(2)从本次实验可以得到的结论是:小球往返摆动一次的时间由 决定;
(3)实验发现,小球只能摆动一段时间。你认为造成小球停下来的原因可能是 ;
(4)摆钟是利用本实验的原理制成的。某一摆钟变慢了,要调准它,应将摆钟的摆长调 (选填“长”或“短” 。

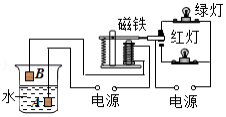
如图所示是一个水位自动报警器的原理图。水位到达金属块 之后, (选填“红”或“绿” 灯亮;当绿灯亮时电磁铁 (选填“有”或“无” 磁性。