随着智能化的普及,机器人在人类的生活中扮演着重要的角色。在图书管理领域机器人可以辅助或替代管理员整理图书,表中所列数据是某新型图书智能管理机器人工作的部分技术参数。
参数 |
工作电压/V |
工作功率/W |
最大负重/N |
提升重物最大高度/m |
数据 |
48 |
40 |
200 |
0.6 |
现在智能机器人以最大负重将图书匀速竖直提升至最大高度,用时5s。则此次提升过程中:
(1)机器人提升图书速度是多少?
(2)机器人对书做功是多少?
(3)机器人的电动机工作电流是多少(结果保留两位小数)?电动机做功是多少?

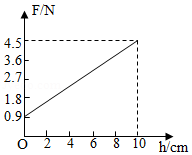
将平底薄壁直圆筒状的空杯,放在饮料机的水平杯座上接饮料。杯座受到的压力 随杯中饮料的高度 变化的图象如图。饮料出口的横截面积 ,饮料流出的速度 ,杯高 ,杯底面积 , 取
(1)装满饮料时,杯底受到饮料的压力为多大?
(2)饮料的密度为多大?
(3)设杯底与杯座的接触面积也为 ,饮料持续流入空杯 后关闭开关,杯对杯座的压强为多大?
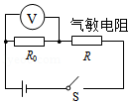
空气质量指数是环境监测的重要指标,下表的空气质量等级是按照空气质量指数 划分的。某兴趣小组自制的空气质量监测仪,用电压表显示空气质量指数,工作原理电路图如图。已知电源电压 ,电压表量程为 ,定值电阻 的阻值为 ,气敏电阻阻值 与 的关系为
|
空气质量指数 |
|
|
|
|
|
|
|
空气质量等级 |
优 |
良 |
轻度污染 |
中度污染 |
重度污染 |
严重污染 |
(1)通过计算,判断电压表示数为 时对应的空气质量等级。
(2)更换定值电阻 可改变监测仪的测量范围,若要使电压表满偏时对应的空气质量指数 ,则更换后的定值电阻 的阻值应为多大?
"国之润,自疏浚始"。新一代国之重器"天鲲号"绞吸挖泥船在河道清淤、湖泊疏浚、吹填造陆等方面发挥着重大作用。
(1)"天鲲号"以功率 进行绞吸,同时以功率 向远处输送岩石泥沙,工作时间 ,共做功多少焦?
(2)"天鲲号"绞刀的工作原理与家用破壁机相似。某破壁机的额定电压 ,额定电流 ."天鲲号"绞刀以功率 工作,相当于多少台这种破壁机正常工作消耗的总功率?
现要测量电阻 的阻值,提供的实验器材有:待测电阻 (约 、两节干电池、电流表、电压表、滑动变阻器、开关及导线若干

(1)用笔画线代替导线,将图1中的实物图连接完整,要求滑动变阻器的滑片 向接线柱 移动时接入电路的阻值变小。
(2)正确连线后,闭合开关,移动滑片 ,电流表示数几乎为零,电压表示数接近电源电压且几乎不变。若电路中只有一处故障,可判断该故障是 。
(3)排除故障继续实验,某次测量,电流表的示数为 ,电压表的示数如图2,该示数为 ,则 。
(4)某同学利用电源(电压未知)、电阻箱 和电流表(指针能正常偏转,但刻度盘示数模糊不清)等器材,测电阻 的阻值,设计的电路如图3.完成下列实验步骤:
①正确连接电路,断开 、 ,将电阻箱 阻值调至最大;
② ;
③ ;
④电阻 。(用测得量的符号表示)
如图是"测量滑动摩擦力大小"的实验装置示意图。

(1)如图甲中,将木板固定水平拉动木块,木块受到的滑动摩擦力与其受到的水平拉力 不一定 大小相等;图乙中,水平拉动木板,待测力计示数稳定后,木块受到的滑动摩擦力与其受到的水平拉力 大小相等。(选填"一定"或"不一定"
(2)如图丙中,水平拉动木板,待测力计示数稳定后,测力计 的示数为 ,测力计 的示数为 ,木块受到的滑动摩擦力大小为 .若增大拉力,当 的示数为 时, 的示数为 。