拓展小组研制的智能操作机器人,如图1,水平操作台为 ,底座 固定,高 为 ,连杆 长度为 ,手臂 长度为 .点 , 是转动点,且 , 与 始终在同一平面内.
(1)转动连杆 ,手臂 ,使 , ,如图2,求手臂端点 离操作台 的高度 的长(精确到 ,参考数据: , .
(2)物品在操作台 上,距离底座 端 的点 处,转动连杆 ,手臂 ,手臂端点 能否碰到点 ?请说明理由.

(年山东莱芜10分)如图1,在⊙O中,E是弧AB的中点,C为⊙O上的一动点(C与E在AB异侧),连接EC交AB于点F,EB= (r是⊙O的半径).
(r是⊙O的半径).
(1)D为AB延长线上一点,若DC=DF,证明:直线DC与⊙O相切;
(2)求EF•EC的值;
(3)如图2,当F是AB的四等分点时,求EC的值.
(2014年山东济南9分)如图1,有一组平行线 ∥
∥ ∥
∥ ∥
∥ ,正方形ABCD的四个顶点分别在
,正方形ABCD的四个顶点分别在 上,EG过点D且垂直于
上,EG过点D且垂直于 于点E,分别交
于点E,分别交 于点F,G,
于点F,G, .
.
(1)AE= ,正方形ABCD的边长= ;
(2)如图2,将∠AEG绕点A顺时针旋转得到 ,旋转角为
,旋转角为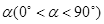 ,点
,点 在直线上,以
在直线上,以 为边在的
为边在的 左侧作菱形
左侧作菱形 ,使点
,使点 分别在直线上.
分别在直线上.
①写出 与
与 的函数关系并给出证明;
的函数关系并给出证明;
②若 ,求菱形的边长.
,求菱形的边长.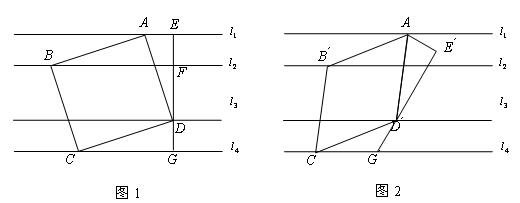
(年辽宁营口14分)四边形ABCD是正方形,AC与BD,相交于点O,点E、F是直线AD上两动点,且AE=DF,CF所在直线与对角线BD所在直线交于点G,连接AG,直线AG交BE于点H.
(1)如图1,当点E、F在线段AD上时,①求证:∠DAG=∠DCG;②猜想AG与BE的位置关系,并加以证明;
(2)如图2,在(1)条件下,连接HO,试说明HO平分∠BHG;
(3)当点E、F运动到如图3所示的位置时,其它条件不变,请将图形补充完整,并直接写出∠BHO的度数.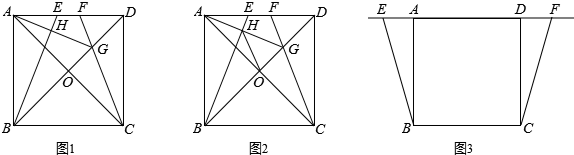
(年辽宁盘锦14分)已知,四边形ABCD是正方形,点P在直线BC上,点G在直线AD上(P、G不与正方形顶点重合,且在CD的同侧),PD=PG,DF⊥PG于点H,交直线AB于点F,将线段PG绕点P逆时针旋转90°得到线段PE,连结EF.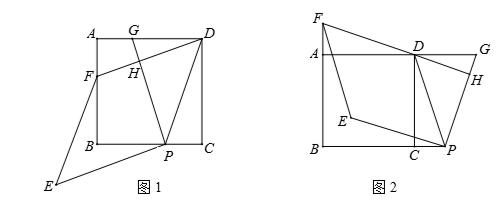
(1)如图1,当点P与点G分别在线段BC与线段AD上时.
①求证:DG=2PC;
②求证:四边形PEFD是菱形;
(2)如图2,当点P与点G分别在线段BC与线段AD的延长线上时,请猜想四边形PEFD是怎样的特殊四边形,并证明你的猜想.
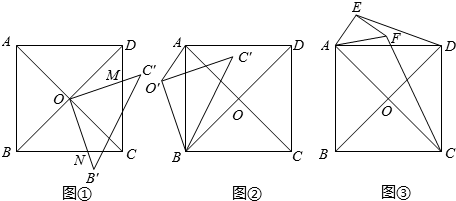
(年辽宁锦州12分)(1)已知正方形ABCD中,对角线AC与BD相交于点O,如图①,将△BOC绕点O逆时针方向旋转得到△B′OC′,OC′与CD交于点M,OB′与BC交于点N,请猜想线段CM与BN的数量关系,并证明你的猜想.
(2)如图②,将(1)中的△BOC绕点B逆时针旋转得到△BO′C′,连接AO′、DC′,请猜想线段AO′与DC′的数量关系,并证明你的猜想.
(3)如图③,已知矩形ABCD和Rt△AEF有公共点A,且∠AEF=90°,∠EAF=∠DAC=α,连接DE、CF,请求出 的值(用α的三角函数表示).
的值(用α的三角函数表示).