如图,根据指令(γ,θ)(γ≥0,-180°<θ≤180°),机器人在平面上能完成下列动作:先原地旋转角度θ(θ为正时,按逆时针方向旋转θ,θ为负时,按顺时针方向旋转θ),再朝其面对的方向沿直线行走距离γ.
(1)现机器人在平面直角坐标系的坐标原点,且面对x轴正方向.试给机器人下一个指令,使其移动到点(4,4).
(2)机器人在完成该指令后,发现在点(17,0)处有一小球 正向坐标原点作匀速直线滚动.已知小球滚动的速度为机器人直线行走速度的2倍,若忽略机器人原地旋转所需的时间,问机器人最快可在何处截住小球?并给出机器人截住小球所需的指令(结果用反三角函数表示).
如图,设 是椭圆
是椭圆 (a>b>0)的左焦点,直线
(a>b>0)的左焦点,直线 为对应的准线,直线与
为对应的准线,直线与 轴
轴
交于 点,
点,  为椭圆的长轴,已知
为椭圆的长轴,已知 ,且
,且 .
.
(Ⅰ)求椭圆的标准方程;
(Ⅱ)求证:对于任意的割线 ,恒有
,恒有 ;
;
(Ⅲ)求△ 面积的最大值.
面积的最大值.
已知函数 ,其中
,其中 .
.
(Ⅰ)当 时,求曲线
时,求曲线 在点
在点 处的切线方程;
处的切线方程;
(Ⅱ)求函数 的单调区间与极值.
的单调区间与极值.
如图,已知 平面
平面 是正三角形,
是正三角形, 。
。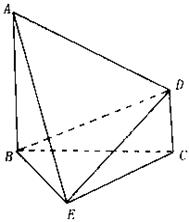
(Ⅰ)求异面直线 与
与 所成角的余弦值;
所成角的余弦值;
(Ⅱ)求证:平面 平面
平面 ;
;
(Ⅲ)求二面角 的余弦值。
的余弦值。
在 中,内角
中,内角 对边的边长分别是
对边的边长分别是 .已知
.已知 .
.
(Ⅰ)若的面积等于 ,求
,求 ;
;
(Ⅱ)若 ,求的面积.
,求的面积.
某学生在上学路上要经过4个路口,假设在各路口是否遇到红灯是相互独立的,遇到红灯的概率都是 ,遇到红灯时停留的时间都是2min
,遇到红灯时停留的时间都是2min
(Ⅰ)求这名学生在上学路上到第三个路口时首次遇到红灯的概率
(Ⅱ)求这名学生在上学路上因遇到红灯停留的总时间 的分布列及期望
的分布列及期望