在”验证牛顿运动定律”的实验中,以下做法错误的是________.
| A.平衡摩擦力时,应将小盘用细绳通过定滑轮系在小车上 |
| B.每次改变小车的质量时,不需要重新平衡摩擦力 |
| C.实验时,先放开小车,再接通打点计时器电源 |
| D.求小车运动的加速度时,可用天平测出小盘的质量m′以及小车质量M,直接用公式a=g求出 |
在测量电源的电动势和内阻的实验中,由于所用电压表(视为理想电压表)的量程较小,某同学设计了如图所示的实物电路.
(1)实验时,应先将电阻箱的电阻调到. (选填“最大值”、“最小值”或“任意值”)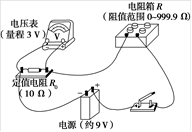
(2)改变电阻箱的阻值R,分别测出阻值R0=10 Ω的定值电阻两端的电压U.下列两组R的取值方案中,比较合理的方案是.(选填“1”或“2”)
| 方案编号 |
电阻箱的阻值R/Ω |
||||
| 1 |
400.0 |
350.0 |
300.0 |
250.0 |
200.0 |
| 2 |
80.0 |
70.0 |
60.0 |
50.0 |
40.0 |
(3)根据实验数据描点,绘出的 -R图象是一条直线.若直线的斜率为k,在坐标轴上的截距为b,则该电源的电动势E=,内阻r=.(用k、b和R0表示)
-R图象是一条直线.若直线的斜率为k,在坐标轴上的截距为b,则该电源的电动势E=,内阻r=.(用k、b和R0表示)
如图所示,某同学在做“探究功与速度变化的关系”的实验。当小车在l条橡皮筋的作用下沿木板滑行时,橡皮筋对小车做的功记为W。当用2条、3条…橡皮筋重复实验时,设法使每次实验中橡皮筋所做的功分别为2W、3W…。
(1)图中电火花计时器的工作电压是V的交流电;
(2)实验室提供的器材如下:长木板、小车、橡皮筋、打点计时器、纸带、电源等,还缺少的测量工具是;
(3)图中小车上有一固定小立柱,下图给出了 4种橡皮筋与小立柱的套接方式,为减小实验误差,你认为最合理的套接方式是; 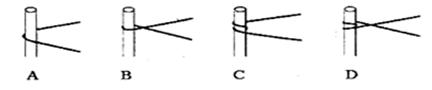
(4)在正确操作的情况下,某次所打的纸带如图所示。打在纸带上的点并不都是均匀的,为了测量橡皮筋做功后小车获得的速度,应选用纸带的部分进行测量(根据下面所示的纸带回答),小车获得的速度是m/s,(计算结果保留两位有效数字)
赵军同学采用如图所示的装置进行了“合外力做功和动能变化的关系”的研究实验。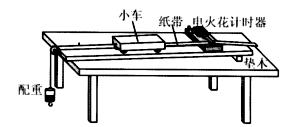
a. 按图1把实验器材安装好,不挂配重,反复移动垫木直到小车能够做匀速直线运动;
b. 把细线系在小车上并绕过定滑轮悬挂质量为100g的配重,接通电源,放开小车,电火花计时器在被小车带动的纸带上打下一系列点。从某点A开始,此后在纸带上每隔4个点取一个计数点,依次标为B、C、D、……;
c. 测量出B、C、D、……各点与A点的距离,分别记为x1、x2、x3、……;
d. 用配重受到的重力分别乘以x1、x2、x3、……,得到配重重力所做的功W1、W2、W3、……;
e. 求出B、C、D、……各点速度的大小,分别记为v1、v2、v3、……,再求出它们的平方 、
、 、
、 、……;
、……;
f. 用纵坐标表示速度的平方 ,横坐标表示配重重力所做的功W,作出
,横坐标表示配重重力所做的功W,作出 图象,并在图象中描出(
图象,并在图象中描出( )坐标点,再连成图线;
)坐标点,再连成图线;
则:
(1)在步骤d中,该同学测得 =40.00cm,则配重重力所做的功
=40.00cm,则配重重力所做的功 =________J;(g取
=________J;(g取 ,结果保留两位有效数字)
,结果保留两位有效数字)
(2)该同学得到的图象如图所示。通过图象可知,打A点时对应小车的速度v0=__________m/s。(结果保留两位有效数字)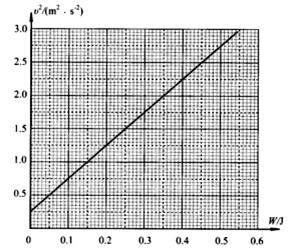
在做“验证机械能守恒定律”的实验时,实验小组A不慎将一条选择好的纸带的前面一部分损坏了,剩下的一部分纸带上各点间的距离数值如图所示,已知打点计时器的周期为 ,重力加速度
,重力加速度 ;重锤的质量为m,已知S1=0.98cm,
;重锤的质量为m,已知S1=0.98cm, ,S3=1.78cm,则
,S3=1.78cm,则
(1)记录B点时重锤的速度表达式vB=___________(写计算式,用字母表示);
(2)重锤从B点到C点重力势能变化量是___________;(保留3位有效数字)
(3)记录C点时重锤的动能 =0.320m,重锤从B点到C点动能变化量是___________;(保留3位有效数字)
=0.320m,重锤从B点到C点动能变化量是___________;(保留3位有效数字)
(4)我们发现, 减和
减和 增并不严格相等,产生误差的主要原因是______________________。
增并不严格相等,产生误差的主要原因是______________________。
在做“研究平抛运动”的实验时,让小球多次沿同一轨道运动,通过描点法画出小球做平抛运动的轨迹,为了能较准确地描绘运动轨迹,下面列出了一些操作要求,将你认为正确的选项代号填在横线上:___________
| A.通过调节使斜槽的末端保持水平 |
| B.小球运动时应与木板上的白纸(或方格纸)接触 |
| C.每次必须由静止释放小球 |
| D.每次释放小球的位置必须不同 |
E. 将球的位置记录在纸上后,取下纸,用直尺将点连成折线