利用如右图所示的装置进行“验证机械能守恒定律”实验,除了所需的打点计时器(带导线)、纸带、复写纸、铁架台、纸带夹和重物,此外还需要下列器材中的_______(填字母代号)
| A.直流电源 |
| B.交流电源 |
| C.游标卡尺 |
| D.毫米刻度尺 |
E.天平及砝码
F.秒表
(8分)用如图(a)所示的实验装置验证机械能守恒定律。
⑴实验中有A:200g的铝块和B:200g的铁块.为了减少误差,应该选择(填字母);
⑵实验操作时应该先接通打点计时器电源再释放纸带,但某同学在操作时做反了,那么通过对这条纸带运算能否判断机械能是否守恒?(填“能”或“否”);
⑶如图(b)是某次实验的一条纸带,O、A、B、C、D、E、F是连续的七个点,每2个点之间的时间为T,若重物质量为m,对应B到E的下落过程中,重锤重力势能的减少量ΔEp=,B到E动能变化量为ΔEk=。
在探究物体的加速度与所受外力、质量的关系实验中,小车及车中的砝码质量用M表示,盘及盘中的砝码质量用m表示。
⑴当M与m的大小关系满足时,才可以认为绳子对小车的拉力大小等于盘和砝码的重力。
⑵某一组同学先保持盘及盘中的砝码质量m一定来做实验,其具体操作步骤如下,以下做法正确的是________。
| A.平衡摩擦力时,应将盘及盘中的砝码用细绳通过定滑轮系在小车上 |
| B.每次改变小车的质量时,不需要重新平衡摩擦力 |
| C.实验时,先放开小车,再接通打点计时器的电源 |
D.用天平测出m以及小车质量M,小车运动的加速度可直接用公式a= 求出 求出 |
⑶另两组同学保持小车及车中的砝码质量M一定,探究加速度a与所受外力F的关系,由于他们操作不当,这两组同学得到的a-F关系图象分别如图1和图2所示,其原因分别是:图1: ;图2: .
某同学用如图所示的装置测定重力加速度:
①电磁打点计时器的工作电压为交流,频率为。
②打出的纸带如图所示,实验时纸带的端应和重物相连接。(选填“甲”或“乙”)
③实验中在纸带上连续打出点1、2、3、……、9,如图所示,由纸带所示数据可算出实验时的加速度为m/s2(保留两位有效数字)。
某实验小组利用图示的装置探究加速度与力、质量的关系.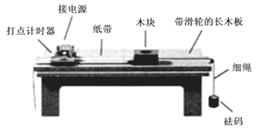
(1)下列做法正确的是()(填字母代号)
| A.调节滑轮的高度,使牵引木块的细绳与长木板保持平行 |
| B.在调节木板倾斜度平衡木块受到的滑动摩擦力时,将装有砝码的砝码桶通过定滑轮拴木块上 |
| C.实验时,先放开木块再接通打点计时器的电源 |
| D.通过增减木块上的砝码改变质量时,不需要重新调节木板倾斜度 |
(2)为使砝码桶及桶内砝码的总重力在数值上近似等于木块运动时受到的拉力,应满足的条件是砝码桶及桶内砝码的总质量木块和木块上硅码的总质量(填远大于,远小于,或近似于)
(3)甲、乙两同学在同一实验室,各取一套图示的装置放在水平桌面上,木块上均不放砝码,在没有平衡摩擦力的情况下,研究加速度a与拉力F的关系,分别得到图中甲、乙两条直线·设甲、乙用的木块质量分别为 、
、 甲、乙用的木块与木板间的动摩擦因数分别为
甲、乙用的木块与木板间的动摩擦因数分别为 、
、 ,由图可知,,_____(填“大于”、“小于”或“等于”)
,由图可知,,_____(填“大于”、“小于”或“等于”)
研究小车匀变速直线运动的实验装置如图(a)所示,其中斜面倾角可调。打点计时器的工作频率为50Hz。纸带上计数点的间距如图(b)所示,其中每相邻两点之间还有4个记录点未画出。
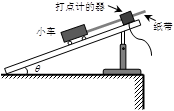

(1)部分实验步骤如下:
| A.测量完毕,关闭电源,取出纸带 |
| B.接通电源,待打点计时器工作稳定后放开小车 |
| C.将小车停靠在打点计时器附近,小车尾部与纸带相连 |
| D.把打点计时器固定在夹板上,让纸带穿过限位孔 |
上述实验步骤的正确顺序是:_________________________(用字母填写)
(2)图(b)中标出的相邻两计数点的时间间隔T=_________s
(3)计数点5对应的瞬时速度大小计算式为v5=_________
(4)为了充分利用记录数据,减小误差,小车加速度大小的计算式应为a=_________