小明用茶色玻璃板和两个相同的棋子做探究像与物到平面镜距离关系的实验。
(1)将玻璃板 立在水平桌面上,在白纸上沿玻璃板前后两表面画线 和 。
(2)在玻璃板前放棋子 ,将棋子 放到玻璃板后,使它与 重合。
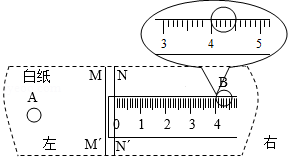
(3)在白纸上沿棋子 和 的边缘画图,测量 的右端到 的距离 ;测量 的左端到 的距离如图所示,其值为 。
(4)改变 的位置,将数据记录在表中,表中有一个数据异常,该数据是 ,它最有可能测量的是 距离。
次数 |
1 |
2 |
3 |
4 |
5 |
|
4.30 |
5.70 |
7.10 |
8.80 |
9.90 |
|
5.40 |
6.50 |
8.50 |
9.60 |
(5)修正(4)中异常数据后,比较 和 ,发现 总是小于 ,为准确获得实验结论,请你对小明实验中的错误操作进行纠正,答: 。
小明同学想探究木块所受浮力大小与排开的液体之间有什么样的关系。按照如图所示的实验方法去探究上述问题,探究结果:
(1)浸入水中的木块所受的浮力F浮= N;
(2)木块排开的水受到的重力G排= N;
(3)比较F浮和G排的大小,可以发现F浮 G排(填“>”、“<”或“=”)。

按照下列要求,作图。

(1)如图甲,开关S闭合后,根据通电导体ab的电流方向、受到磁场力F的方向,在图中标出磁铁的N极和S极。
(2)如图乙,画出作用在杠杆OA上的拉力F的力臂L1。
(3)如图丙,小球A用钢管固定在小车的支架上,小车向左作匀速直线运动,不计空气阻力,画出小球A受力的示意图。
(4)光线通过图丁中虚线框中的透镜,传播方向发生了改变,请在虚线框中填上合适的透镜。
电热毯(俗称“电褥子”)是根据电流的 热 效应制成的。小亮家的电热毯通电后指示灯不亮,小亮检修时发现是电热丝断了,他把电热丝的两个断头连接起来,他发现连接处比别处更热,这是为什么?
仔细观察以下四个标志,仿照示例请在其余三个标志中任选两个说出标志名称或标志的含义,并用物理知识说明设立标志的原因。

|
所选标志 |
名称(含义) |
原因 |
|
丁 |
高压危险 |
电阻一定时,电压越大,电流越大,易发生触电事故 |
电炉子是根据电流的 效应制成的。如图所示,电炉丝热得发红,而和它相连接的铜导线却几乎不发热,为什么?
