解方程:
已知:如图,DG⊥BC ,AC⊥BC,EF⊥AB,∠1="∠2" 求证:CD⊥AB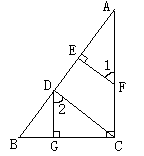
证明:∵DG⊥BC,AC⊥BC(已知)
∴∠DGB=∠ACB=90º(垂直定义)
∴DG∥AC(_______________________________)
∴∠2=____(_______________________________)
∵∠1=∠2(已知)
∴∠1=∠_____ (等量代换)
∴EF∥CD(_______________________________)
∴∠AEF="∠______" (_______________________________)
∵EF⊥AB (已知)
∴∠AEF=90º (___________________________________ )
∴∠ADC=90º(_______________________________)
∴CD⊥AB (_______________________________)
一个正数m的平方根是 与
与 ,求a和m的值。
,求a和m的值。
求下列各式中的x(每小题4分,共8分)
(1)、4x2-16=0(2)、8(x-3)3+64=0
计算(每小题3分,共6分)
(1)、  +3—5(2)、|
+3—5(2)、| | + |
| + | |- |
|- | |
|
如图,反比例函数 (
( )与长方形
)与长方形 在第一象限相交于
在第一象限相交于 、
、 两点,
两点, ,
, ,连结
,连结 、
、 、
、 .记
.记 、
、 的面积分别为
的面积分别为 、
、 .
.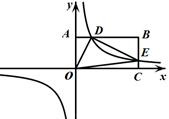
(Ⅰ)①点 坐标为 ;② (填“>”、“<”、“=”);
坐标为 ;② (填“>”、“<”、“=”);
(Ⅱ)当点为线段 的中点时,求
的中点时,求 的值及点坐标;
的值及点坐标;
(Ⅲ)当 时,试判断
时,试判断 的形状 ,并求的面积.
的形状 ,并求的面积.